


Para los OEM y proveedores de soluciones de estacionamiento autónomo, el radar 4D mmWave es un sensor esencial para los sistemas APS/HPP. Su capacidad para proporcionar datos verificables de distancia y elevación en entornos con poca luz, ocluidos y de corto alcance reduce significativamente la incertidumbre del sistema, lo que permite una implementación escalable y de nivel empresarial de soluciones de estacionamiento automatizadas.
1. Aspectos operativos y de ingeniería de APS vs HPP
Comprender la diferencia entre APS y HPP es fundamental para los integradores de sistemas.
-
APS (sistema de estacionamiento automático)
Concentrado en maniobras de estacionamiento asistido con un conductor al tanto. La complejidad de la integración es moderada, pero aún se requiere un control preciso y redundancia. -
HPP (Home Zone Parking Pilot).
Permite una navegación totalmente autónoma dentro de zonas estructuradas, como aparcamientos. Los vehículos se mueven cientos de metros evitando obstáculos dinámicos e infraestructura estática.
El sistema tiene la responsabilidad total de la seguridad; Se requiere redundancia en percepción y control.
Desde el punto de vista empresarial, la implementación de HPP requiere confiabilidad de detección certificada y mediciones deterministas de campo cercano, lo que hace que la selección del radar sea una opción de ingeniería crítica.
2. Desafíos técnicos en las instalaciones de aparcamiento
Los ingenieros automotrices y los integradores de sistemas deben tener en cuenta que los estacionamientos típicos plantean desafíos de percepción extremos:
2.1 Iluminación variable e inadecuada
Los lotes de superficie y los garajes subterráneos tienen condiciones de iluminación muy diferentes, que incluyen parpadeo, retroiluminación y oscuridad casi total. Es posible que los sistemas basados en la visión por sí solos no puedan proporcionar mediciones de distancia precisas.
2.2 Requisitos de precisión en el campo cercano
Las plazas de aparcamiento suelen ser sólo entre 30 y 50 cm más anchas que el propio vehículo. La estimación de profundidad basada en píxeles en un rango inferior a 2 metros puede ser inexacta y provocar raspaduras o colisiones.
2.3 Obstáculos irregulares y de bajo nivel
Los topes de ruedas, las columnas, los escalones bajos y las tuberías elevadas son comunes y están escasamente ubicados. Los sistemas de visión pueden identificarlos erróneamente como antecedentes, lo que aumenta el riesgo operativo. Estas incertidumbres se reducen mediante mediciones físicas mediante radar.
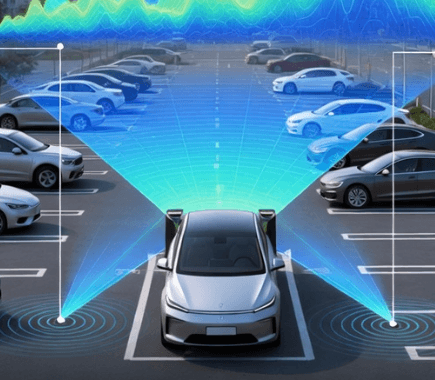
3. Cómo el radar 4D mmWave supera los desafíos de ingeniería
El radar 4D mmWave proporciona datos de distancia y elevación verificables e independientes de la iluminación, complementando cámaras y sensores ultrasónicos para cumplir con los requisitos de seguridad empresarial.
3.1 Verificación de la Distancia Física.
El radar, a diferencia de los sistemas basados en la visión que infieren la profundidad, mide la distancia directamente. Produce constantemente una precisión de nivel centimétrico en condiciones de poca luz, oclusión y polvo, algo esencial para la implementación de HPP.
3.2 Diferenciar obstáculos según la elevación
El radar 3D tradicional no puede distinguir entre obstáculos transitables e intransitables. La resolución de elevación del radar 4D permite a los integradores de sistemas distinguir entre objetos de 5 cm y 15 cm, lo que reduce los frenados en falso y las interrupciones operativas.
3.3 Seguimiento de objetivos múltiples con alta resolución en el campo cercano
Los objetivos suelen estar muy juntos en pasillos estrechos o estacionamientos estructurados. Las densas nubes de puntos del radar 4D permiten un seguimiento preciso de vehículos, peatones y puestos, lo que permite que los sistemas HPP de nivel empresarial utilicen una planificación de ruta determinista.
4. Radar tridimensional en la arquitectura del sistema HPP
El principio de integración se aplica a los proveedores de soluciones.
-
Cámara: comprensión semántica de líneas de estacionamiento, flechas y clasificación de objetos.
-
Radar 4D: validación física de obstáculos, que proporciona datos deterministas y procesables de distancia y elevación.
El radar funciona como capa de verificación de seguridad del sistema. Cuando la confianza de la cámara disminuye debido a la iluminación o la oclusión, el radar garantiza una planificación adecuada del camino y evita colisiones.
Esta arquitectura permite el estacionamiento desatendido mientras mantiene una seguridad operativa verificable, que es necesaria para la implementación comercial y la certificación OEM.
5. Radar 4D versus otros sensores en sistemas empresariales
Radar 4D versus sensores ultrasónicos
Los sensores ultrasónicos cubren distancias muy cortas, tienen frecuencias de actualización bajas y proporcionan información espacial limitada. El radar 4D cubre el entorno de alcance cercano a medio, lo que permite a los sistemas HPP detectar y planificar su trayectoria desde el principio.
Radar 4D versus LiDAR
LiDAR ofrece una alta resolución espacial pero es más caro, consume más energía y es más difícil de integrar. El radar 4D proporciona una solución rentable con una adecuada percepción de obstáculos de campo cercano para una implementación escalable en vehículos de producción.
6. Consideraciones para la implementación y la integración.
La integración de nivel empresarial del radar 4D implica:
-
Posiciones de montaje: ubicaciones frontal, lateral y en esquina para cubrir puntos ciegos y áreas de corto alcance.
-
La fusión de datos es la integración en etapa inicial de nubes de puntos de radar y datos de cámaras para permitir una planificación de ruta determinista.
-
Redundancia del sistema: el radar sirve como capa de validación, lo que garantiza operaciones a prueba de fallos incluso cuando fallan la visión u otros sensores.
Las implementaciones futuras darán prioridad a la fusión de múltiples sensores en las primeras etapas, lo que reducirá la incertidumbre de la percepción general sin dejar de ser rentable.
7. Preguntas frecuentes: Perspectiva empresarial en el radar 4D mmWave
P1: ¿Por qué el radar mmWave es más importante en APS/HPP que en escenarios de autopista?
En estacionamiento, las mediciones de distancia absoluta se deben tomar en el campo cercano. El radar proporciona lecturas deterministas en situaciones en las que la visión por sí sola puede fallar.
P2: ¿Cuál es la diferencia entre radar 4D y 3D en implementaciones HPP?
La resolución de elevación distingue entre obstáculos transitables e intransitables, lo cual es esencial para la planificación automatizada de rutas.
P3: ¿Pueden las cámaras y los sensores ultrasónicos proporcionar soluciones HPP empresariales adecuadas?
Ofrecen solo una cantidad limitada de cobertura. El radar 4D proporciona verificación espacial continua de rango cercano a medio, lo cual es fundamental para una operación autónoma segura.
P4: ¿Se puede utilizar el radar 4D para reemplazar el LiDAR en soluciones de estacionamiento?
No exactamente. El radar 4D logra un equilibrio entre costo, confiabilidad y complejidad de integración, brindando un rendimiento adecuado para una implementación escalable.
P5: ¿Es confiable el radar 4D en ambientes ocluidos o con poca luz?
Sí, el radar mmWave es independiente de la iluminación, lo que permite una detección precisa incluso en garajes subterráneos.
P6: ¿Dónde se suele instalar el radar 4D en los sistemas de estacionamiento empresarial?
La cobertura de campo cercano y de punto ciego se proporciona desde el frente, los lados y las esquinas.
P7: ¿Se necesitarán sensores adicionales en los futuros sistemas de estacionamiento empresarial?
En lugar de simplemente agregar sensores, la tendencia es hacia una fusión más profunda, que implica la integración temprana de datos de radar y cámaras para reducir la incertidumbre del sistema.
Finalmente,
Para los fabricantes de equipos originales y proveedores de soluciones de estacionamiento autónomo, el radar 4D mmWave es una base de seguridad determinista en lugar de un reemplazo de la cámara. Su confiable percepción de elevación y distancia de campo cercano lo convierte en un componente esencial de los sistemas de estacionamiento autónomos de alto nivel, lo que permite una implementación APS/HPP escalable y de nivel empresarial.