



التغلب على تحديات تجزئة المشهد لتطبيقات الرادار المتقدمة
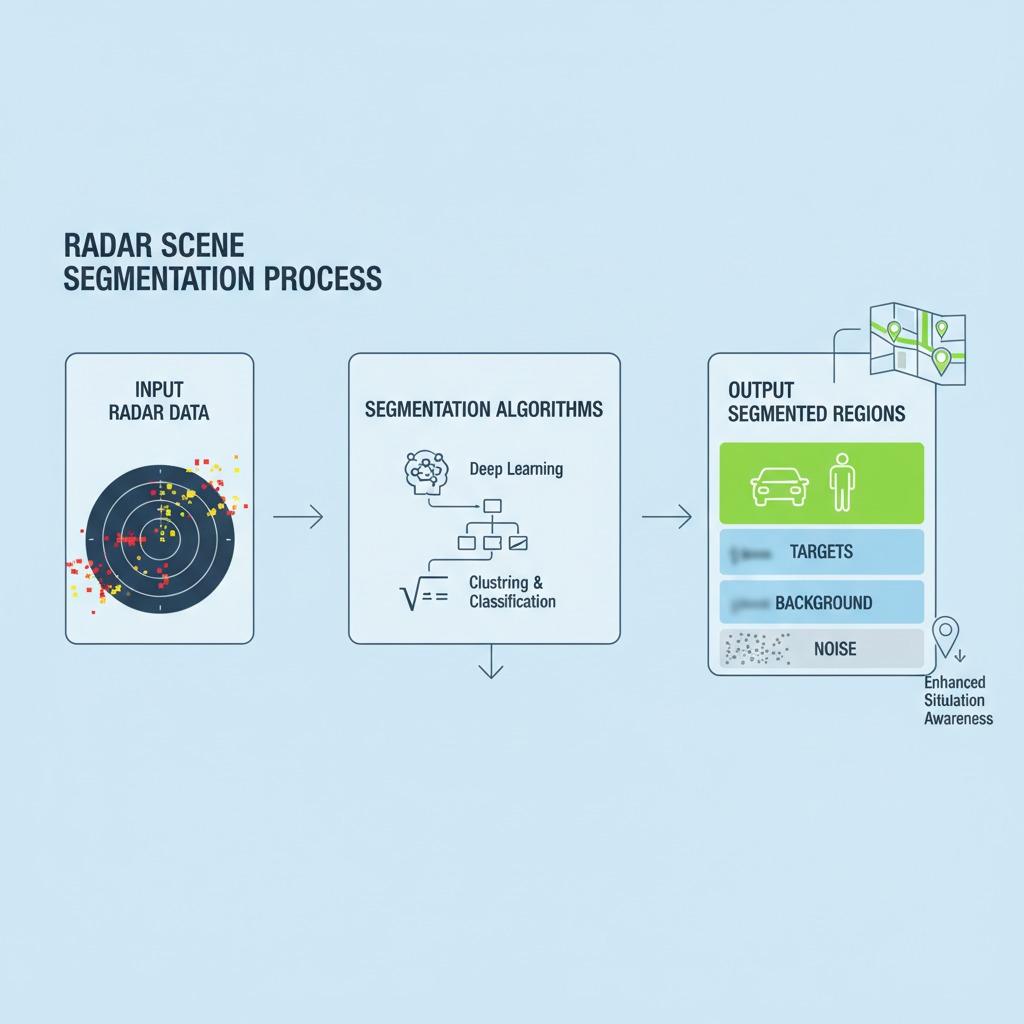
في مجال معالجة إشارات الرادار ، تبرز تقنية تجزئة المشهد كأداة بالغة الأهمية لتقسيم مشهد الرادار بدقة إلى مناطق ذات دلالة، مثل التمييز بين الأهداف والخلفية والتشويش. مع ذلك، يواجه المختصون تحديات كبيرة، منها انخفاض الدقة المكانية الذي يُشوش حدود الأجسام، وتداخل إشارات دوبلر الدقيقة الذي يُعقّد تحليل الحركة، والتشويش المستمر الذي يُخفي الإشارات الضعيفة، وصعوبة تتبع الأهداف المتعددة عند تداخلها أو تحركها بشكل غير متوقع. قد تؤدي هذه المشكلات إلى تفسيرات غير دقيقة، وانخفاض موثوقية النظام، وعدم كفاءة في تطبيقات مثل القيادة الذاتية والمراقبة وأنظمة الدفاع. يتطلب تحسين تجزئة المشهد بشكل فعال اتباع مناهج مبتكرة لتعزيز الدقة والموثوقية.
تحسين الدقة المكانية لتقسيم المشهد بشكل أوضح
يُعدّ محدودية الدقة المكانية في أنظمة الرادار أحد التحديات الرئيسية في تجزئة المشاهد، مما يؤدي غالبًا إلى دمج أو عدم وضوح معالم المشهد. تُعيق هذه المشكلة القدرة على عزل العناصر الفردية بدقة. ولحلّها، يُمكن استخدام خوارزميات متطورة لتحسين الدقة، مثل تلك التي تستفيد من الشبكات العصبية للتعلم العميق، لإعادة بناء تفاصيل أدق من بيانات الرادار ذات الدقة المنخفضة. ومن خلال استكمال المعلومات المفقودة وتحسين وضوح الحواف، تُحسّن هذه الأساليب الدقة المكانية دون الحاجة إلى ترقيات في الأجهزة. على سبيل المثال، يُتيح دمج تقنيات معالجة الإشارات المتفرقة تحديدًا أفضل لمكونات المشهد، مما يجعل تجزئة المشهد أكثر موثوقية. بالإضافة إلى ذلك، يُمكن للأساليب الهجينة التي تجمع بين الرادار وأجهزة استشعار تكميلية مثل LiDAR أن تُعزز الدقة بشكل أكبر، مما يضمن أنه حتى في البيئات المزدحمة، تُنتج التجزئة خرائط مكانية دقيقة تدعم مهامًا لاحقة مثل اكتشاف الأجسام.
تخفيف تأثيرات التشويش والضوضاء الناتجة عن تأثير دوبلر الدقيق في المشاهد الديناميكية
تُحدث بصمات دوبلر الدقيقة، الناجمة عن الاهتزازات أو الدوران الطفيف للأجسام المتحركة، تباينًا يُعطّل تجزئة المشهد التقليدية من خلال إحداث تشوهات طيفية. وبالإضافة إلى تحديات كبح التشويش - حيث تُطغى أصداء البيئة على إشارات الهدف - يؤدي ذلك إلى نتائج إيجابية خاطئة وأخطاء في التجزئة. يتمثل الحل العملي في استخدام تقنيات ترشيح تكيفية مُصممة خصيصًا لاستخراج بصمات دوبلر الدقيقة، مثل تحليل التردد الزمني باستخدام تحويلات الموجات الصغيرة لفصل هذه البصمات عن تحولات دوبلر الرئيسية. أما بالنسبة لكبح التشويش، فتتفوق خوارزميات المعالجة التكيفية المكانية الزمنية (STAP) من خلال التقدير الديناميكي وطرح تباين التشويش، مما يحافظ على سلامة الهدف. لا تُحسّن هذه الأساليب تجزئة المشهد فحسب من خلال عزل العناصر الديناميكية، بل تُعزز أيضًا نسب الإشارة إلى الضوضاء الإجمالية، مما يسمح للأنظمة بالعمل بكفاءة عالية في البيئات الحضرية أو الحرجية المزدحمة.
تبسيط عملية تتبع الأهداف المتعددة من خلال تحسين التجزئة
يُشكّل تتبّع الأهداف المتعددة تحديًا كبيرًا لتقسيم المشهد، إذ غالبًا ما تتسبب المسارات المتداخلة وانعكاسات الرادار المتشابهة في أخطاء الربط، ما يؤدي إلى فقدان المسارات أو تحديدها بشكل خاطئ. ويتفاقم هذا الأمر بسبب مشكلات الدقة المكانية والتشويش المذكورة سابقًا. تشمل الحلول الفعّالة استخدام مرشحات ربط البيانات الاحتمالية المدمجة مع مسارات تقسيم المشهد، والتي تُحدّد احتمالات التطابقات المحتملة بين الهدف والمشهد، وبالتالي حلّ الغموض في الوقت الفعلي. علاوة على ذلك، يُمكن لنماذج تقسيم المشهد القائمة على الرسوم البيانية نمذجة التفاعلات بين الأهداف، باستخدام العُقد للأجسام المكتشفة والحواف للقيود العلائقية المُستمدة من تنبؤات الحركة. ومن خلال دمج حلقات التغذية الراجعة من مُخرجات التتبّع لتحسين حدود التقسيم، تُحقق هذه التقنيات دقة أعلى في سيناريوهات الأهداف المتعددة. عمليًا، يُمكن لأطر التعلّم الآلي المُدرّبة على مجموعات بيانات مُتنوعة أن تتعلّم التعامل مع حالات الحجب والحركات غير الخطية، ما يضمن تتبّعًا سلسًا حتى في البيئات عالية الكثافة.
من خلال معالجة هذه التحديات الأساسية - قيود الدقة المكانية، وتداخلات إشارة دوبلر الدقيقة، ومتطلبات كبح التشويش، وتعقيدات تتبع الأهداف المتعددة - عبر حلول خوارزمية مُوجَّهة، يتحول تجزئة المشهد من عائق إلى عامل تمكين قوي لتقنيات الرادار من الجيل التالي. ولا يقتصر تطبيق هذه الاستراتيجيات على تعزيز الأداء فحسب، بل يفتح أيضًا آفاقًا لتطبيقات أكثر أمانًا وكفاءة في مختلف القطاعات.