


بالنسبة لمصنعي المعدات الأصلية ومقدمي حلول مواقف السيارات المستقلة، رادار 4D mmWave هو جهاز استشعار أساسي لأنظمة APS/HPP. إن قدرتها على توفير بيانات المسافة والارتفاع التي يمكن التحقق منها في البيئات منخفضة الإضاءة والمغلقة وقريبة المدى تقلل بشكل كبير من عدم اليقين في النظام، مما يسمح بنشر حلول مواقف السيارات الآلية القابلة للتطوير على مستوى المؤسسة.
1. الجوانب التشغيلية والهندسية لـ APS مقابل HPP
يعد فهم الفرق بين APS وHPP أمرًا بالغ الأهمية لمتكاملي الأنظمة.
-
APS (نظام ركن السيارة الآلي)
يركز على مناورات ركن السيارة المساعدة مع وجود سائق في الحلقة. يعتبر مستوى تعقيد التكامل معتدلاً، ولكن لا تزال هناك حاجة إلى التحكم الدقيق والتكرار. -
HPP (الدليل الإرشادي لوقوف السيارات في المنطقة الرئيسية).
يسمح بالتنقل المستقل بالكامل داخل المناطق المنظمة، مثل مرائب السيارات. تتحرك المركبات مئات الأمتار مع تجنب العوائق الديناميكية والبنية التحتية الثابتة.
يتحمل النظام المسؤولية الكاملة عن السلامة؛ مطلوب التكرار في الإدراك والسيطرة.
من وجهة نظر المؤسسة، يتطلب نشر HPP موثوقية استشعار معتمدة وقياسات حتمية للمجال القريب، مما يجعل اختيار الرادار خيارًا هندسيًا بالغ الأهمية.
2. التحديات الفنية في مرافق مواقف السيارات
يجب على مهندسي السيارات ومتكاملي الأنظمة أن يأخذوا في الاعتبار أن مواقف السيارات النموذجية تشكل تحديات إدراكية شديدة:
2.1 الإضاءة المتغيرة وغير الكافية
تتميز قطع الأراضي والجراجات الموجودة تحت الأرض بظروف إضاءة مختلفة تمامًا، بما في ذلك الوميض والإضاءة الخلفية والظلام شبه الكامل. قد لا تتمكن الأنظمة المعتمدة على الرؤية وحدها من توفير قياسات دقيقة للمسافة.
2.2 متطلبات الدقة في الحقل القريب
في كثير من الأحيان تكون أماكن وقوف السيارات أوسع بمقدار 30-50 سم فقط من السيارة نفسها. يمكن أن يكون تقدير العمق المستند إلى البكسل في نطاق أقل من 2 متر غير دقيق، مما يؤدي إلى حدوث خدوش أو اصطدامات.
2.3 العوائق غير النظامية ومنخفضة المستوى
تعد مصدات العجلات، والأعمدة، والدرجات المنخفضة، والأنابيب العلوية شائعة وموضعة بشكل متناثر. قد تخطئ أنظمة الرؤية في تعريف هذه العناصر كخلفية، مما يزيد من المخاطر التشغيلية. يتم تقليل حالات عدم اليقين هذه من خلال القياس المادي باستخدام الرادار.
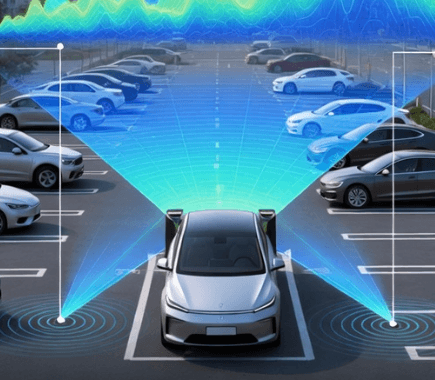
3. كيف يتغلب رادار الموجة 4D mmWave على التحديات الهندسية
يوفر رادار mmWave رباعي الأبعاد معلومات عن المسافة والارتفاع مستقلة عن الإضاءة ويمكن التحقق منها، مما يكمل الكاميرات وأجهزة الاستشعار بالموجات فوق الصوتية لتلبية متطلبات السلامة في المؤسسة.
3.1 التحقق من المسافة المادية.
الرادار، على عكس الأنظمة القائمة على الرؤية التي تستنتج العمق، يقيس المسافة مباشرة. إنه ينتج باستمرار دقة على مستوى السنتيمتر في ظروف الإضاءة المنخفضة والانسداد والغبار - وهو أمر ضروري لنشر HPP.
3.2 التمييز بين العوائق على أساس الارتفاع
لا يستطيع الرادار التقليدي ثلاثي الأبعاد التمييز بين العوائق القابلة للقيادة والعوائق غير القابلة للعبور. تتيح دقة الارتفاع للرادار رباعي الأبعاد لمتكاملي النظام التمييز بين الأجسام التي يبلغ طولها 5 سم و15 سم، مما يقلل من الكبح الخاطئ والانقطاعات التشغيلية.
3.3 تتبع الأهداف المتعددة بدقة عالية في المجال القريب
غالبًا ما تكون الأهداف قريبة من بعضها البعض في الممرات الضيقة أو مواقف السيارات المنظمة. تسمح السحب النقطية الكثيفة للرادار رباعي الأبعاد بالتتبع الدقيق للمركبات والمشاة والأعمدة، مما يمكّن أنظمة HPP على مستوى المؤسسة من استخدام تخطيط المسار الحتمي.
4. رادار رباعي الأبعاد في بنية نظام HPP
ينطبق مبدأ التكامل على موفري الحلول.
-
الكاميرا: الفهم الدلالي لخطوط ركن السيارة، والأسهم، وتصنيف الكائنات.
-
الرادار رباعي الأبعاد: التحقق المادي من العوائق، وتوفير بيانات حتمية وقابلة للتنفيذ عن المسافة والارتفاع.
يعمل الرادار كطبقة التحقق من سلامة النظام. عندما تنخفض ثقة الكاميرا بسبب الإضاءة أو الانسداد، يضمن الرادار التخطيط السليم للمسار وتجنب الاصطدام.
تتيح هذه البنية إمكانية ركن السيارة دون مراقبة مع الحفاظ على سلامة تشغيلية يمكن التحقق منها، وهو أمر مطلوب للنشر التجاري وشهادة OEM.
5. الرادار رباعي الأبعاد مقابل أجهزة الاستشعار الأخرى في أنظمة المؤسسات
الرادار رباعي الأبعاد وأجهزة الاستشعار بالموجات فوق الصوتية
تغطي أجهزة الاستشعار بالموجات فوق الصوتية مسافات قصيرة جدًا، وتتميز بمعدلات تحديث منخفضة، وتوفر معلومات مكانية محدودة. يغطي الرادار رباعي الأبعاد البيئة القريبة إلى المتوسطة المدى، مما يسمح لأنظمة HPP باكتشاف مسارها والتخطيط له في وقت مبكر.
الرادار رباعي الأبعاد مقابل LiDAR
يوفر LiDAR دقة مكانية عالية ولكنه أكثر تكلفة، ويستهلك المزيد من الطاقة، ويصعب دمجه. يوفر الرادار رباعي الأبعاد حلاً فعالاً من حيث التكلفة مع إدراك مناسب للعوائق القريبة من المجال للنشر القابل للتطوير في مركبات الإنتاج.
6. اعتبارات النشر والتكامل.
يتضمن التكامل على مستوى المؤسسات للرادار رباعي الأبعاد ما يلي:
-
أوضاع التثبيت: المواقع الأمامية والجانبية والزاوية لتغطية النقاط العمياء والمناطق القريبة المدى.
-
دمج البيانات هو تكامل المرحلة المبكرة لسحب نقاط الرادار وبيانات الكاميرا لتمكين تخطيط المسار الحتمي.
-
تكرار النظام: يعمل الرادار كطبقة تحقق، مما يضمن عمليات آمنة من الفشل حتى عند فشل الرؤية أو أجهزة الاستشعار الأخرى.
ستعطي عمليات النشر المستقبلية الأولوية لدمج أجهزة الاستشعار المتعددة في المرحلة المبكرة، مما يقلل من عدم اليقين العام في الإدراك مع الحفاظ على فعاليته من حيث التكلفة.
7. الأسئلة المتداولة: منظور المؤسسة على رادار الموجة 4D mmWave
س1: لماذا يعتبر رادار mmWave أكثر أهمية في APS/HPP منه في سيناريوهات الطرق السريعة؟
في مواقف السيارات، يجب إجراء قياسات المسافة المطلقة في المجال القريب. يوفر الرادار قراءات حتمية في المواقف التي قد تفشل فيها الرؤية وحدها.
س2: ما الفرق بين الرادار رباعي الأبعاد وثلاثي الأبعاد في عمليات نشر HPP؟
يميز دقة الارتفاع بين العوائق القابلة للقيادة والعوائق غير القابلة للعبور، وهو أمر ضروري لتخطيط المسار الآلي.
س3: هل يمكن للكاميرات وأجهزة الاستشعار بالموجات فوق الصوتية توفير حلول HPP مناسبة للمؤسسات؟
إنها توفر قدرًا محدودًا فقط من التغطية. يوفر الرادار رباعي الأبعاد التحقق المكاني المستمر من المدى القريب إلى المتوسط، وهو أمر بالغ الأهمية للتشغيل المستقل الآمن.
س4: هل يمكن استخدام الرادار رباعي الأبعاد ليحل محل LiDAR في حلول مواقف السيارات؟
ليس تمامًا. يحقق الرادار رباعي الأبعاد التوازن بين التكلفة والموثوقية وتعقيد التكامل، مما يوفر أداءً مناسبًا للنشر القابل للتطوير.
س5: هل يمكن الاعتماد على الرادار رباعي الأبعاد في البيئات منخفضة الإضاءة أو المغطاة؟
نعم، رادار mmWave مستقل عن الإضاءة، مما يسمح بالكشف الدقيق حتى في المرائب الموجودة تحت الأرض.
س6: أين يتم تثبيت الرادار رباعي الأبعاد عادةً في أنظمة مواقف السيارات بالمؤسسات؟
يتم توفير تغطية للمجال القريب والنقاط العمياء من الأمام والجوانب والزوايا.
س7: هل ستكون هناك حاجة إلى أجهزة استشعار إضافية في أنظمة مواقف السيارات المستقبلية في المؤسسات؟
بدلاً من إضافة أجهزة الاستشعار ببساطة، يتجه الاتجاه نحو دمج أعمق، والذي يتضمن التكامل المبكر لبيانات الرادار والكاميرا لتقليل عدم اليقين في النظام.
أخيرًا،
بالنسبة لمصنعي المعدات الأصلية ومقدمي حلول مواقف السيارات المستقلة، يعد رادار 4D mmWave بمثابة خط أساس محدد للسلامة وليس بديلاً للكاميرا. إن إدراك المسافة القريبة والارتفاع الذي يمكن الاعتماد عليه يجعله مكونًا أساسيًا لأنظمة مواقف السيارات المستقلة عالية المستوى، مما يسمح بنشر APS/HPP قابل للتطوير على مستوى المؤسسات.