


Why scene segmentation matters in sensing and perception systems
Scene segmentation is one of those engineering terms that sounds abstract until a system starts missing the point. In radar, vision, robotics, and other perception-driven applications, the real problem is not just detecting that something is present. The harder job is separating one meaningful area from another so the system can interpret what is moving, what is static, and what deserves attention. For engineers and product teams, that distinction affects performance, false alarms, downstream tracking, and ultimately whether the product is useful in the field.
That is why scene segmentation sits at the center of many design decisions. It helps turn a noisy input stream into a structured view of the environment. If the segmentation is too coarse, multiple objects get blended together. If it is too aggressive, parts of the scene get chopped into meaningless fragments. Either way, the result can weaken detection, degrade multi-target tracking, and make the system harder to trust.
The practical problem: raw data is rarely readable
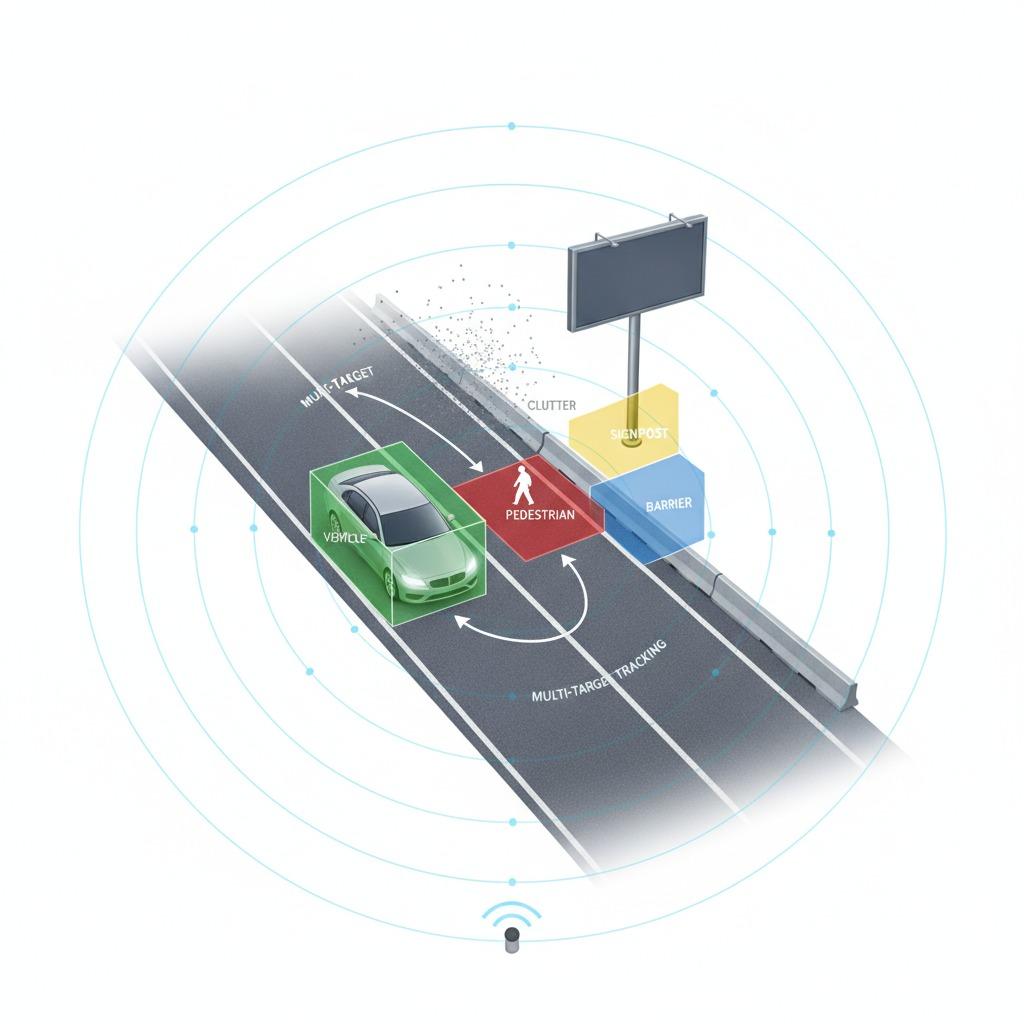
Most sensing systems do not fail because they collect no data. They fail because they collect too much unorganized data. Reflections overlap, moving objects mask one another, and background structures create persistent clutter. In radar applications, for example, a vehicle, pedestrian, signpost, and roadside barrier may all be present in the same frame. Without a useful segmentation strategy, the system sees a crowded field of returns instead of distinct scene elements.
This is where clutter suppression becomes more than a signal-processing feature. It is part of the segmentation strategy itself. The cleaner the separation between relevant targets and background noise, the better the system can assign meaning to the scene. Buyers often focus on detection range first, but in many deployments the bigger issue is interpretability. A platform that “sees” far away but cannot separate scene components clearly may still underperform in real use.
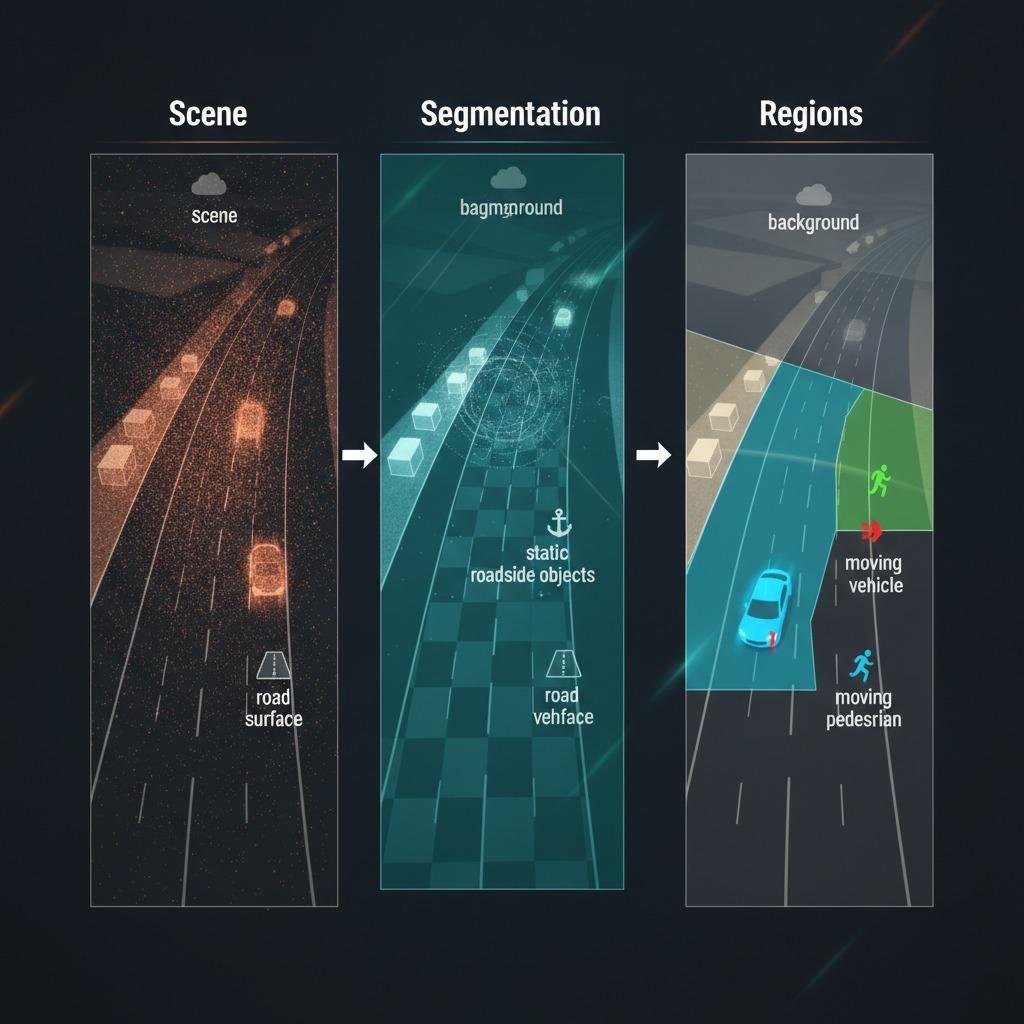
What segmentation helps a system decide
At a basic level, scene segmentation helps answer four questions: where are the object boundaries, which signals belong together, what is background, and what has changed. Those questions sound simple, but they drive many higher-level functions. A machine vision system might use segmentation to isolate defects on a moving web. A radar system might use it to distinguish vehicles in adjacent lanes. A mobile robot may rely on it to separate floor, wall, obstacle, and human motion.
One useful way to think about the design trade-off is this: the better the segmentation, the less work later stages have to do. Tracking, classification, and path prediction all improve when the upstream scene is already separated into sensible regions. That is especially true in environments with occlusion, mixed motion, or rapidly changing background conditions.
Key technical factors that shape segmentation quality
Spatial resolution
Spatial resolution sets the floor for how much detail a system can separate in space. If resolution is limited, two adjacent objects may merge into one region before the software even has a chance to analyze them. Higher resolution can improve scene segmentation, but it also raises processing load and may introduce new calibration and data-handling challenges. Engineers should treat resolution as a system-level choice, not a marketing number.
Micro-Doppler signature
In radar-based systems, micro-Doppler signature can provide valuable clues about motion patterns inside a scene. Small movements, such as limb motion or rotating components, help distinguish one object from another even when they overlap in range or angle. That said, micro-Doppler is not magic. It works best when the rest of the pipeline already manages noise, interference, and sampling limits well enough to preserve the detail.
Clutter suppression
Good clutter suppression prevents static or irrelevant returns from overwhelming the scene map. But there is a caution here: over-suppressing clutter can remove legitimate low-motion objects or hide subtle changes in the background. The best systems tend to use adaptive approaches, especially in outdoor environments where lighting, surface conditions, and reflective structures change over time.
Multi-target tracking
Segmentation is often evaluated by what it enables downstream. In multi-target tracking, clear separation helps maintain object identity across frames. Poor segmentation creates merged blobs, broken tracks, and false re-acquisitions. Once that happens, the tracker spends more time repairing the scene than understanding it.
How buyers should compare segmentation approaches
There is no single best method for every application. The right choice depends on the scene complexity, object size, motion characteristics, and whether the system must run in real time. For a simple environment, a rule-based or threshold-driven approach may be enough. In a dense or dynamic scene, more adaptive methods are usually worth the extra compute.
When comparing options, ask practical questions. Can the method handle overlapping objects? Does it stay stable when environmental conditions change? What happens when the target slows down or stops? Does the system preserve small objects, or does it optimize only for dominant returns? These are not theoretical concerns. They are the issues that show up during pilot runs and field validation.
Common mistakes that create weak segmentation
One common mistake is treating segmentation as a post-processing step. By the time the data is already noisy and compressed, many useful distinctions are lost. Another mistake is assuming one dataset proves robustness. A scene that looks clean in a controlled test area may behave very differently in rain, glare, vibration, reflective surroundings, or crowding.
A third issue is tuning the system for a single target type and then expecting it to generalize. A segmentation profile that works well for large moving objects may perform badly when smaller or slower targets enter the same space. Buyers should be wary of demos that look polished but do not reveal how the system behaves under mixed conditions.
What to ask before you buy or integrate
Before selecting a platform or algorithm, ask for evidence of how it handles boundary cases, not just ideal ones. Request examples that show overlapping targets, background interference, and low-contrast scenes. If the application depends on tracking, ask how segmentation supports object persistence across frames. If the use case relies on motion detail, ask how the system preserves signatures without amplifying clutter.
It also helps to define success in operational terms. The right segmentation method is not necessarily the one with the most advanced label. It is the one that improves decision quality for your actual workflow, whether that means fewer false alarms, better object separation, or more reliable downstream tracking.
A short buyer’s takeaway
Scene segmentation is worth serious attention whenever a sensing system must interpret a crowded, changing, or partially obscured environment. Strong segmentation improves readability, supports better tracking, and makes the entire stack easier to trust. Weak segmentation does the opposite, even if the front-end sensor itself looks impressive on paper.
If you are evaluating a new platform, focus less on headline specs alone and more on how the system separates objects under real operating conditions. That is where the difference between a promising prototype and a usable product usually becomes obvious.
Next step for engineering teams
Start with the scene, not the feature list. Map the likely sources of clutter, overlap, and motion in your application, then test whether the proposed segmentation approach can separate those conditions cleanly. A careful trial in representative environments is usually more valuable than a long spec sheet, and frankly, it tends to save time later.