

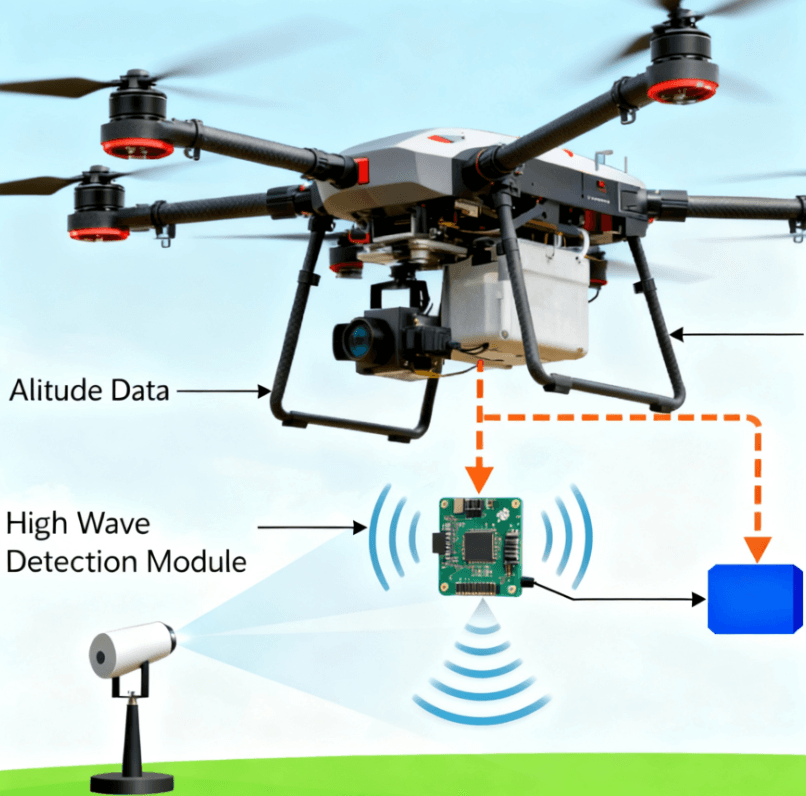
在低空无人机飞行、精准着陆或复杂地形作业中控制飞行高度一直是一项挑战。许多无人机飞行员都遇到过这种情况:超声波传感器在建筑物附近读数波动,气压计受风力和温度变化的影响,激光雷达在雾天失效。对于无人机在低空稳定悬停而言,传统传感器往往不足以胜任。
U200A毫米波雷达能够应对这些挑战。它在各种天气条件下都能可靠工作,提供高精度的实时高度数据,并为无人机制造商、系统集成商,甚至DIY无人机爱好者带来显著价值。
低空无人机作业面临的挑战
无人机在低空飞行时面临三大挑战:
不稳定悬停
传统超声波传感器在建筑物或地面附近容易受到多径反射的影响,导致悬停高度不稳定。即使是微小的误差也会影响航拍、喷洒或巡检作业。地形跟随难度
飞越山丘、不平坦的地面或茂密的树叶时,单个传感器往往无法准确检测地形变化,导致偏离安全飞行路线。环境干扰
光学传感器和激光雷达传感器在雾、雨或沙尘环境下性能下降,测量结果不可靠。根据IEEE无人机传感器研究报告,毫米波雷达在恶劣环境下仍能保持稳定的测量结果,因此非常适合低空无人机作业。
毫米波雷达如何提高无人机精度
U200A 采用调频连续波 (FMCW) 技术,工作在 77–81 GHz 频段。它之所以能够解决上述难题,原因如下:
高精度
即使在低空悬停或复杂地形上空,也能保持±0.2米的精度。宽测量范围
覆盖范围为 0.2 米至 200 米,适用于低空至中空飞行。全天候可靠性
在雾、雨、尘土和弱光条件下均能保持稳定的性能。快速响应
无人机以 20 Hz 的更新速率接收近乎实时的高度数据,从而实现精确控制。
请访问Linpowave 无人机解决方案页面,查看实际集成案例。简而言之,U200A 为无人机配备了“高度感知眼”,从而提升了安全性和可靠性。
U200A 主要规格和实际应用经验
| 范围 | 规格 | 笔记 |
|---|---|---|
| 频带 | 77–81 GHz | 高抗干扰能力,全天候运行 |
| 测量范围 | 0.2–200 米 | 适用于低空和中空飞行 |
| 准确性 | ±0.2 米 | 在典型条件下 |
| 刷新率 | 20赫兹 | 实时高度反馈 |
| 接口 | TTL/CAN/RS422 | 与常用飞行控制器兼容 |
| 运行环境 | -40~85°C,5~90% 相对湿度 | 在恶劣条件下依然可靠 |
| 尺寸/重量 | 70×50×5.5 毫米 / 约 10 克 | 轻巧易安装 |
安装和集成技巧
根据实践经验,一些细节会产生重大影响:
安装角度:保持雷达朝向地面,避免倾斜超出其垂直视场范围。
接口匹配:根据您的飞行控制器选择 TTL、CAN 或 RS422;飞行前在地面进行测试。
低空测试:虽然该模块可以测量低至 0.2 米的高度,但低于 5 米的实际测试可确保稳定悬停。
传感器融合:与 IMU、GPS 或光学传感器集成可以进一步提高精度和安全性。
实际应用
精准着陆
无人机可以自动检测着陆平台的高度,确保即使在屋顶或船甲板上也能平稳着陆。农业喷洒
实时高度反馈确保在不平坦的农田上均匀喷洒。电力线路巡检
地形跟随功能可使无人机沿着输电线路或风力涡轮机叶片保持稳定,从而降低碰撞风险。
像美国宇航局的无人机地形跟踪研究这样的研究证明了毫米波雷达在复杂地形作业中的有效性。
行业价值和投资回报率
使用U200A毫米波雷达具有明显的优势:
降低事故风险:精确的高度测量可最大限度地减少着陆或碰撞错误。
提高运行效率:自动低空悬停和地形跟随减少了人工干预。
经济高效:与多传感器设置相比,U200A 重量轻、集成度高、易于安装,并且需要的维护量极少。
常见问题解答 (FAQ)
问题1:U200A在5米以下高度的精度如何?
答:在典型条件下,精度保持在±0.2米左右,但建议进行实际测试。
Q2:它如何与飞行控制器连接?
答:支持 TTL、CAN 和 RS422;提供 SDK 和文档以供集成。
Q3:它可以在雾天或雨天运行吗?
答:是的,毫米波雷达对环境干扰的抵抗力很强。
Q4:功耗是多少?
答:功率约为 2 瓦,支持 5V/1A、12V/0.5A 或 13–30V 电源输入。
Q5:是否提供定制服务?
答:是的,测量范围、输出接口或固件功能可以根据无人机的要求进行定制。
结论与后续步骤
U200A毫米波雷达为无人机提供实时、高精度、全天候的高度感知。它重量轻、易于安装且高度可靠,是低空悬停、地形跟踪和精确着陆的理想搭档。
为了让您的无人机飞行更安全、更精准, 请下载 U200A 数据手册或联系我们获取定制解决方案。让您的无人机真正“感知”到自身的高度。